寸法測定・外観検査の需要について
製品の納入先から品質を担保するため、抜き取り検査から全数検査に変更をお願いされた、目視で行なっていた検査から3Dの検証データも納品するようにお願いされた、というような動きは世界的に広がってきています。それにあたり画像検査装置、3Dスキャナーやロボットの導入を考える際、どのような点をチェックするべきか、概要を見て行きます。
要求項目と要求精度の確認
寸法測定や、外観検査を目的とした3Dスキャナーは一般に3DCAD化を目的とした3Dスキャナーより精度は低くても大丈夫なことが多いです。精度の高さはスキャナーの種類にもよりますが、概ねスキャンにかかる時間と比例しますのでバランスの良いところを選択することになります。
ソフトウエアの使い勝手
寸法測定や、外観検査を目的とした3Dスキャナーは一般に3DCAD化を目的とした3Dスキャナーより精度は低くても大丈夫なことが多いです。精度の高さはスキャナーの種類にもよりますが、概ねスキャンにかかる時間と比例しますのでバランスの良いところを選択することになります。
外観検査のOK・NG判定に用いられるソフトウエアのアルゴリズムについても、OKデータを持っておいて、しきい値を設定して判別するものや、形状一致率で判別するものなどソフトウエアごとに大きく異なります。OK品なのにソフトウエアでの設定上NG判定が連発してしまうといったことにならないようよく検討しましょう。
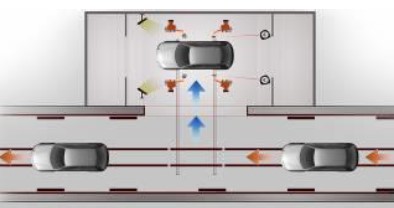
スキャナーの設置箇所
既存の製造ラインが完成されている場合、どのようにして製品の検査を行うかは大いに関係者を悩ませるポイントです。改良を施してインラインに検査工程を組み込む方式もありますが、タクトタイムへの追従のために、測定器の数を増やすといった対策が必要になることが多いです。自動車のホワイトボディなどの検査では、車体を一旦ラインから外し、測定後にラインに戻すバイパス方式が多く取られています。
このような問題は、3Dスキャナーを購入しても解決できるものではありません。我々三次元スキャンテクノロジー協会では、多くの工場への3Dスキャナー導入のお手伝いをしてきたノウハウがありますので、お悩みの際は是非ご相談ください。
ロボットのティーチング
ロボットを用いて検査を行う場合、はじめに動作を覚えさせる「ティーチング」を行わなくてはなりません。ティーチングに関しても様々なアプローチで自動化が進んでおり、スキャナーの最適姿勢の判断、ロボット姿勢の定義からパス生成、干渉確認までほぼ自動で行えるようになってきています。ただし、自動で生成されたティーチングデータは、必ず最適なスキャンを行えるかと言うとそうではなく、例えば多少角度をつけてスキャンした方が良いボルトやエッジ部を、真上からスキャンするデータとしてしまうことなどがあります。完全自動化は現在も進展途中の技術と言えるでしょう。
同じ製品をずっと作っているので一度ティーチングを行えば良いのか、ロット切り替わり時にも再度ティーチングを行わないといけないのかなど、状況によって最適な選択は異なります。
一度導入すれば品質保証だけでなく、検査時間の縮小や、同じ工程に今まで従事していた人を別の仕事に割り振ることができる等、多くのメリットがある3D検査装置のですが、導入時には大きな金額が動き、上に挙げたような多くの検討事項があります。また、現場現場ごとに対処すべき課題が存在することと思います。
三次元スキャンテクノロジー協会では、3DスキャンはNG品を見つけ出すための技術ではなく、OK品をOKという根拠を証明する技術であり、日本のものづくりのこれからのためにさらなる普及・活用が求められていると考えています。お悩みの際は是非一度当協会にご相談ください。
もっと詳しく聞きたい!
当会ではいつでも対面またはwebでご説明(初回無料:2回目以降有料)いたしますので、興味をお持ちの方は是非お知らせください(メール相談は無料です)。
もっと詳しく聞きたい方は、事務局(info@3dst.org)までご連絡ください。
すでに、多くのの企業様で、「良いも悪いもお話していただき相談して良かった、検討している最中のモノだとやりたい事が出来ないのがわかり導入機材が明確になった」、等の声を頂いています。セカンドオピニオン的な感じで気軽にご相談ください。
*まずは無料相談を!是非お問合せください!